- Новости науки и техники
- Робототехника

Новый шаг к функциональным квантовым компьютерам сделали исследователи из США. Они описали в своей статье устройство, объединяющее квантовые источники света с электроникой на единой платформе при помощи стандартного 45-нанометрового полупроводникового процесса. Интегральная схема, генерирующая потоки коррелированных фотонных пар, пригодится в будущем для квантовых вычислений, датчиков и безопасной связи. Это первый случай создания столь сложной системы с использованием стандартных технологий про
Читать ещё

13 июля 2025, 00:00
Жуки-киборги могут стать спасателями в будущих катастрофах - New-Science.ru
Жертвы катастроф, оказавшиеся под завалами разрушенных зданий или шахт, однажды могут быть спасены к
Читать ещё

07 июля 2025, 00:00
Neuralink увеличивает число пациентов с мозговыми имплантами до семи - New-Science.ru
Компания Neuralink, основанная Илоном Маском, официально имплантировала свои нейроинтерфейсы N1 семи
Читать ещё

06 июля 2025, 19:32
Новая технология MIT "на лету" самообучает роботов только по видеоданным
Современные роботы, особенно мягкие, часто сталкиваются с трудностями в управлении из-за необходимости сложных сенсоров и точных моделей. Ученые из MIT CSAIL создали систему NJF, которая позволяет роботам самостоятельно учиться управлять своими движениями, используя только визуальные данные с камеры. Эта технология уже хорошо показала себя на разных роботах. Решение обещает сделать робототехнику более гибкой, доступной и эффективной в сложных и нестабильных условиях, где традиционных методов кон
Читать ещё

03 июля 2025, 15:07
Этот ИИ «думает» как вы: языковая модель научилась предсказывать человеческие решения
Ученые разработали ИИ-систему Centaur, которая точно предсказывает, какие решения примут люди в разных ситуациях — от азартных игр до логических задач. Модель обучили на данных из 160 психологических экспериментов, в которых 60 000 человек сделали более 10 млн выборов. В результате Centaur превзошёл классические когнитивные теории и другие ИИ в 31 из 32 тестов, показав способность обобщать знания и справляться даже
Читать ещё

25 июня 2025, 13:43
IBM и RIKEN представили гибридный, квантово-классический компьютер
IBM и национальная исследовательская лаборатория Японии RIKEN представили первую систему IBM Quantum System Two, установленную за пределами США и напрямую подключенную к суперкомпьютеру Fugaku. Система использует 156-кубитный процессор Heron, который превосходит предыдущее поколение как по частоте ошибок, так и по скорости, достигая схемных операций в 10 раз быстрее, чем раньше. Эта интеграция позволит разрабатывать квантово-классические рабочие процессы, решая проблемы, с которыми ни квантовые,
Читать ещё

23 июня 2025, 00:00
Новое исследование раскрывает уникальное преимущество человеческого мозга перед искусственным интеллектом - New-Science.ru
Большинство из нас даже не задумывается о том, насколько сложно и одновременно естественно наш мозг
Читать ещё

19 июня 2025, 14:14
Китай представил первый в мире оптический чип для сверхвысокопараллельных вычислений
Современные оптические процессоры обычно переносят информацию на одной длине волны света. Новая конструкция, предложенная китайскими учеными, делит лазер на более чем сотню четко окрашенных каналов, каждый из которых одновременно проходит через один и тот же чип размером с ноготь. Высокопроизводительная параллельная оптическая интегральная схема способна обеспечить теоретическую пиковую вычислительную мощность в 2560 TOPS (триллионов операций в секунду) при оптической тактовой частоте 50 ГГц, чт
Читать ещё
17 июня 2025, 00:00
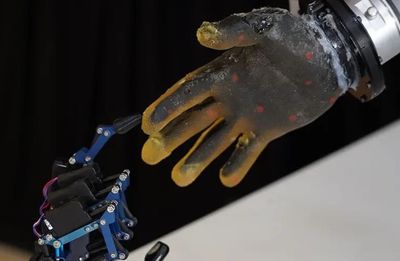
Роботы, которые "чувствуют": Прорывная искусственная кожа для роботов может революционизировать взаимодействие человека и машины - New-Science.ru
Ученые Кембриджского университета представили новый тип роботизированной кожи, который может изменит
Читать ещё

11 июня 2025, 14:02
Масштабный отказоустойчивый квантовый компьютер IBM появится в 2029-м
IBM поделилась планом создания «первого в мире крупномасштабного, отказоустойчивого квантового компьютера». Компания утверждает, что IBM Starling, поставки которого клиентам должны начаться в 2029 году, будет в 20 000 раз мощнее ведущих современных квантовых компьютеров. Сообщается, что Starling послужит основой для последующей системы IBM Quantum Blue Jay, которая будет включать 2000 логических кубитов и сможет выполнять миллиард операций.
Читать ещё